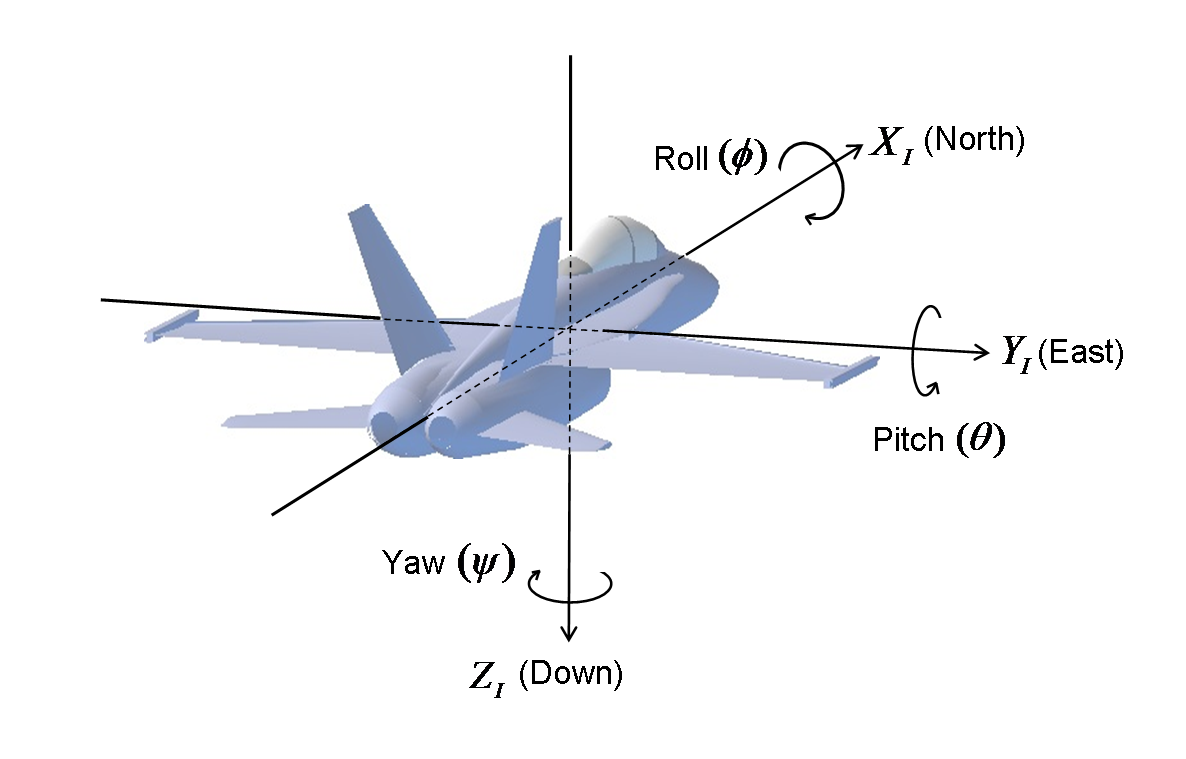
Euler Angles were first introduced by Leonhard Euler. According to his theorem, any rotation can be described using three angles (Φ,Θ,Ψ) also referred as roll, pitch and yaw. They can be seen as head movements: saying “no” is the yaw, saying “yes” is the pitch, and leaning the head left or right is the roll.
Note that the order that which the angles are represented is not important, but the order of rotation is. For this post, we will be using the ZYX. The following equation is a very important expression, which represents the rotation along the three axes in the ZYX order. Note that for shortening purposes, cos(x) is c(x) and sin(x) is s(x).
After doing the maths, in the following equation we can observe the rotation matrix for angles ϕ,θ,ψ which is represented using the order Z,Y,Z, which can also be denoted as RZYX(ϕ,θ,ψ).
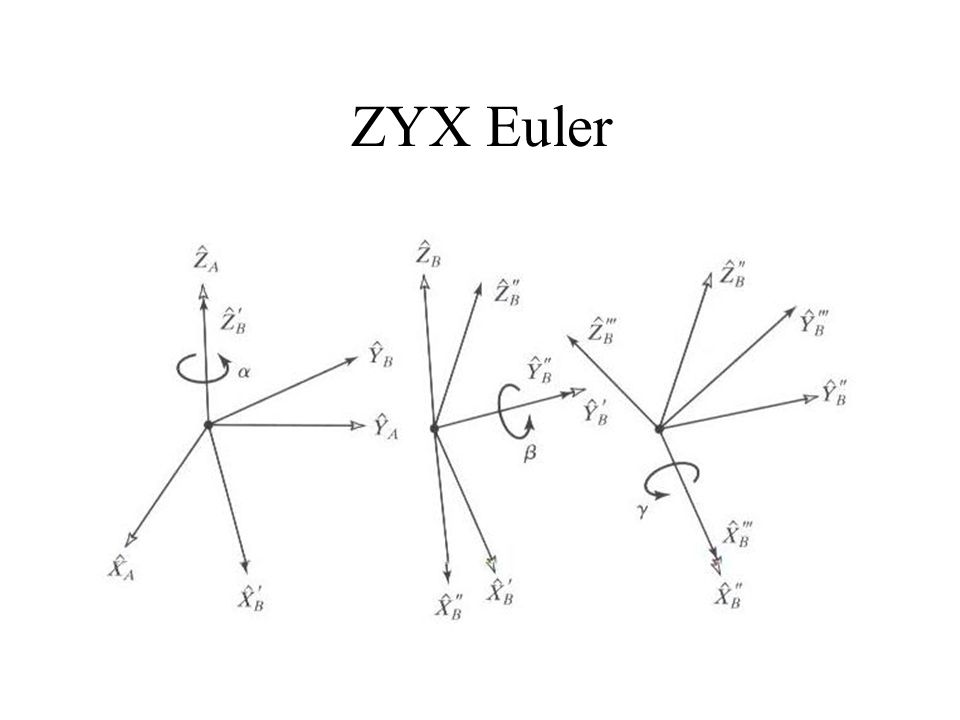
Note that in some literature, these angles can also be referred as α,β,γ, equivalent to ϕ,θ,ψ. An example of the rotation order is represented in the following figure:
Euler angles seem to be intuitive and easy to work with. However, they have a limitation called gimbal lock. This singularity is the loss of one degree of freedom in a three-gimbal system. It occurs when two out of the three gimbals are aligned, and a degree of freedom is lost. An example is shown in here:
Depending on the application, the Euler rotation convention XYZ,ZYX,... can be changed to avoid the gimbal lock in the typical scenarios. Using ZYX, the gimbal lock will happen when θ=π/2. Luckily, some of the algorithms that are commonly used (DCM and Madgwick) don’t work with Euler Angles, so this won’t be a problem at all. Substituting the value of θ the result is:
Using some basic trigonometric relations it becomes the following equation. In this expression, it can be seen that changing the values ϕ,ψ, has the same effect. One degree of freedom has been lost. In this case, a pitch of 90 degrees will lead to a gimbal lock.